
서비스 설명
3축 가속도센서, 3축 자이로센서, 3축 지자기 센서 (MPU6050, HMC5883)를 이용해, 6자유도 또는 9자유도의 IMU 센서를 구현하고, 가속도, 속도, 위치 정보도 출력합니다. 단 가속도,속도, 위치는 시간에 따라 오차가 누적될 수 있습니다.
본 소스는 실제 자세 추정이 필요한 상용 application에도 판매된바 있습니다.
본 소스는 PIC18 MCU에서 구현되었고, 짐벌락 문제가 없는 알고리즘이 사용되었으며 100Hz 이상의 출력을 낼수 있습니다. C언어로 구현되어 있으므로 어떠한 MCU에도 쉽게 포팅가능하며, 고속 32비트 MCU를 사용한다면 1KHz이상의 출력도 가능할 수 있습니다.
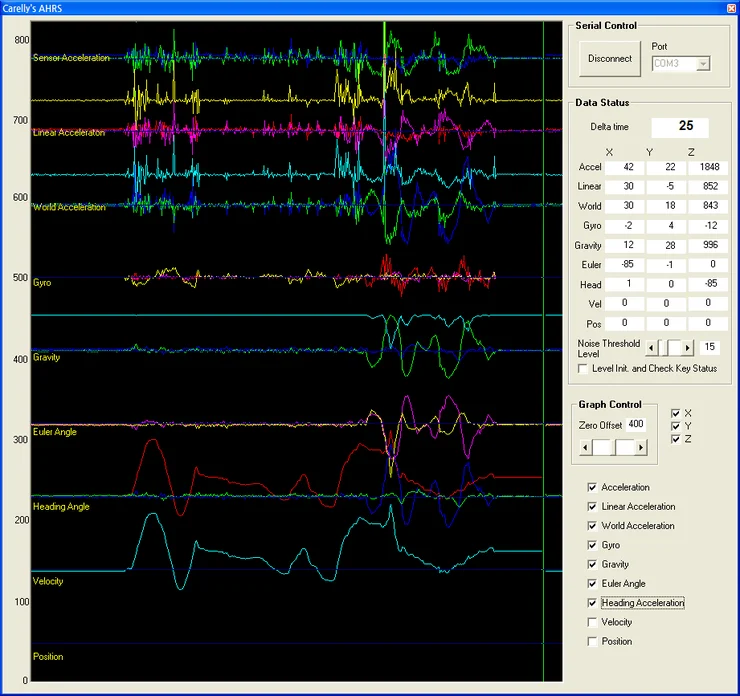
PIC18에서 직접 계산하여 IMU값도 출력하지만, 시리얼 통신을 통해 PC로 9축 센서값만 전달하고 PC에서 모든 계산을 하는 모드도 있습니다. PC에서는 Visual Basic으로 작성된 그래프 표시 프로그램(소스)과, Visual C++로 작성된 물체의 3D 자세 표시 프로그램(소스)이 포함되어 있습니다.
센서의 crosstalk오차를 줄이기 위한 calibration 방법도 윈도우 프로그램에는 적용되어 있습니다.
서비스 제공 절차
1. 상담
원하시는 기능과 일치하는지 확인합니다.
2. 결제
3. C소스등 개발자료를 송부합니다.
4. 구매확정
(소스는 최종 상용제품의 결과물이므로 환불되지 않으니 결제전 확인 바랍니다.)
5. 2주간 QnA 서비스 제공
의뢰인 준비사항
C언어를 다룰줄 알아야 소스코드의 이해를 할 수 있습니다.
컴파일을 하려면 MPLabc C18, Visual C++6.0 이상 이 있어야 합니다.
기술 수준
고급:최적화 설계
팀 규모
1인
상주 여부
상주 불가능
보드
PIC
개발 언어
C
C++

가격 정보
짐벌락없는 IMU/AHRS센서C소스
PIC18 MCU로 IMU/AHRS를 구현하고 윈도우에서 이 정보를 그래프나 3D형상으로 보는 C소스제공
소스 코드 제공
작업일
1일
수정 횟수
0회
전문가 정보
연락 가능 시간 : 9시 ~ 18시
평균 응답 시간 : 10분 이내총 작업개수
-만족도
-회원구분
기업회원세금계산서
발행가능임베디드 시스템 과 통신장치를 개발하는 전문회사입니다. 임베디드시스템 SW개발시 RTOS,드라이버 등 시스템구축, 디버깅 시스템 구축 및 문제 진단 컨설팅을 하며, 25년이상 각종 유무선 프로토콜과 통신장치들을 개발한 경험을 갖고 있습니다. 또한 국내/해외 주식 및 가상화폐 자동매매 와 백테스트 프로그램을 개발하여 시장에서 수익내는 다양한 전략을 발굴하고 공개하고 있습니다.
취소 및 환불 규정
가. 기본 환불 규정 1. 전문가와 의뢰인의 상호 협의하에 청약 철회 및 환불이 가능합니다. 2. 작업이 완료된 이후 또는 자료, 프로그램 등 서비스가 제공된 이후에는 환불이 불가합니다. ( 소비자보호법 17조 2항의 5조. 용역 또는 「문화산업진흥 기본법」 제2조 제5호의 디지털콘텐츠의 제공이 개시된 경우에 해당) 나. 전문가 책임 사유 1. 전문가의 귀책사유로 당초 약정했던 서비스 미이행 혹은 보편적인 관점에서 심각하게 잘못 이행한 경우 결제 금액 전체 환불이 가능합니다. 다. 의뢰인 책임 사유 1. 서비스 진행 도중 의뢰인의 귀책사유로 인해 환불을 요청할 경우, 사용 금액을 아래와 같이 계산 후 총 금액의 10%를 공제하여 환불합니다. 총 작업량의 1/3 경과 전 : 이미 납부한 요금의 2/3해당액 총 작업량의 1/2 경과 전 : 이미 납부한 요금의 1/2해당액 총 작업량의 1/2 경과 후 : 반환하지 않음
상품정보고시
| 서비스 제공자 | 와치독 | 취소/환불 조건 | 취소 및 환불 규정 참조 |
| 인증/허가사항 | 상품 상세 참조 | 취소/환불 방법 | 취소 및 환불 규정 참조 |
| 이용조건 | 상품 상세 참조 | 소비자상담전화 | (크몽 고객센터) 1544-6254 |
리뷰
아직 작성된 리뷰가 없어요.