Micro AHRS 및 복합 항법 장치 개발 프로젝트
#IMU #AHRS #ARS #INS #GNSS
(2)
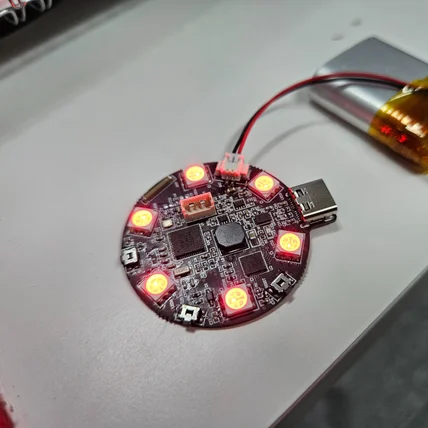
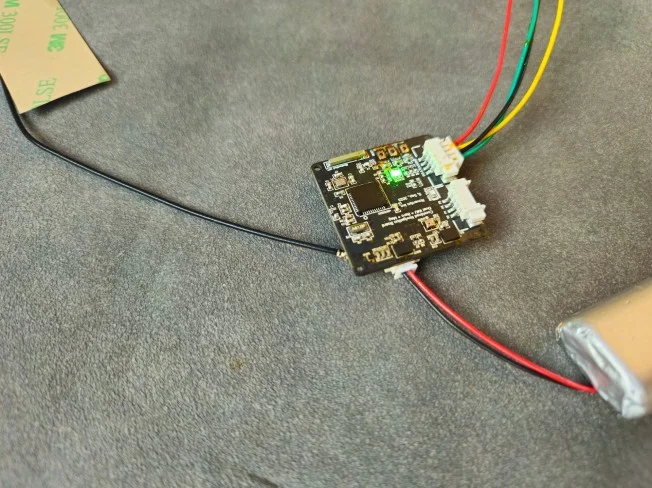
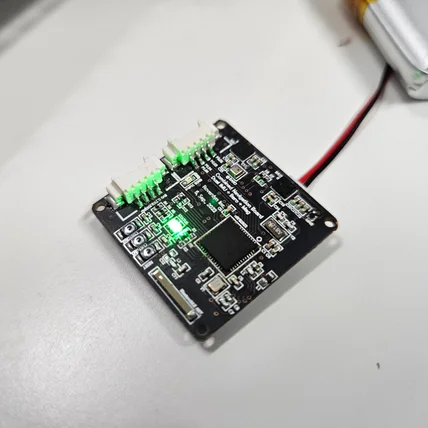
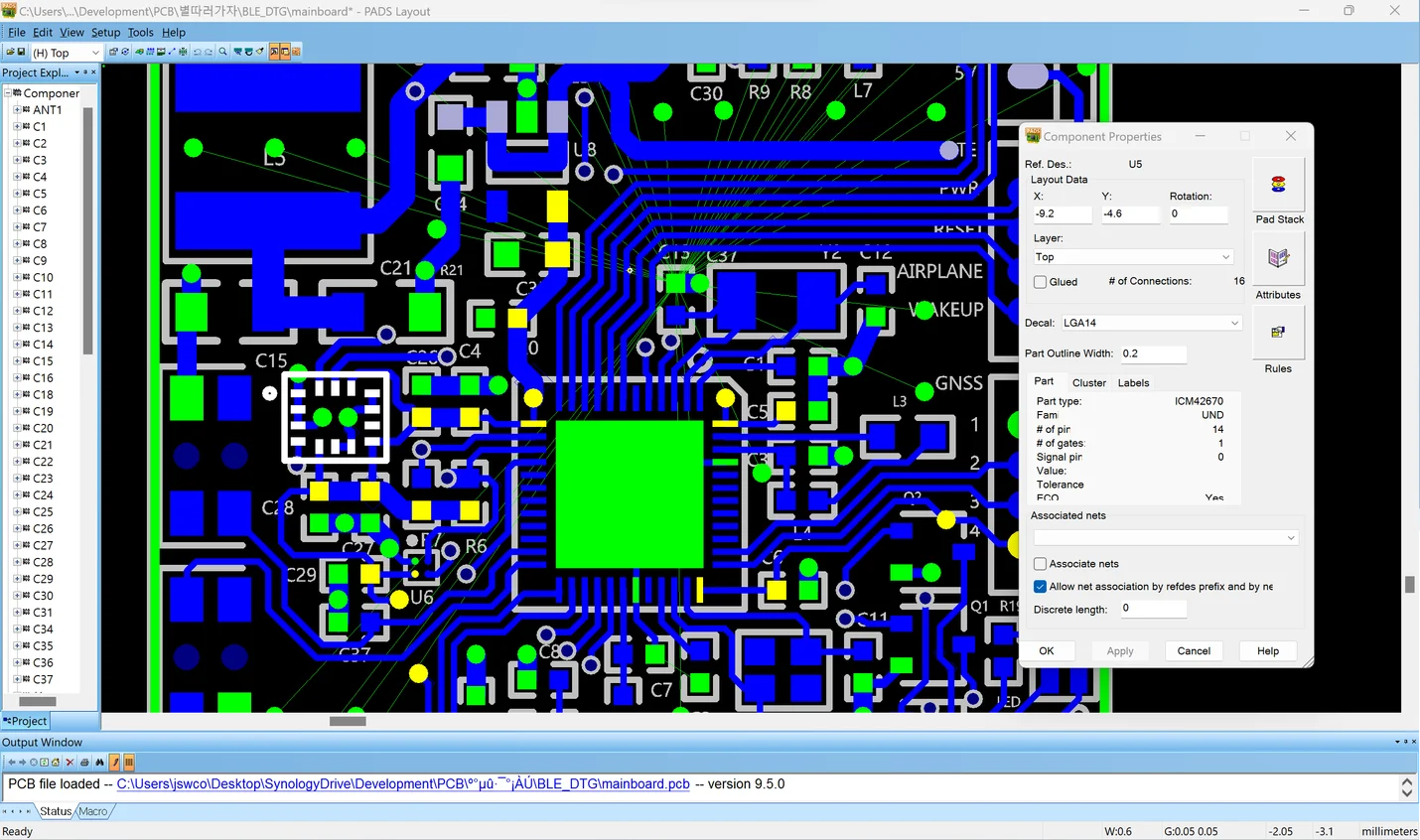
- IMU/AHRS 회로 및 패턴 설계
- ICM42670/ICM42688/ICM20602/ICM20608/ICM20948
- Kalman Filter 기반 펌웨어
- C/C++기반
- 각도 정밀도 1.5도 이내(EKF 적용 시 0.5도 이내 가능)
- Raw data IIR 필터 기본 적용
- EKF/UKF는 별도 문의 바람
1) RFP 혹은 요구사항 접수
2) 개발 미팅 및 하드웨어 설계
3) 펌웨어 개발
4) 펌웨어-라이브러리 분리 혹은 소스코드 제공
5) 기능 검증
- RFP 혹은 개발 요구 명세서
- IMU 센서 정의 및 데이터시트
- 개발 일정표 혹은 간트 차트
기술 수준
팀 규모
상주 여부
보드
개발 언어
INS/IMU 및 ARS/AHRS
- INS/IMU 하드웨어 회로 및 패턴 설계 - ICM42670/42688/20602/20948 - 펌웨어
센서 수
2개
작업일
14일
수정 횟수
1회
총 작업개수
1건만족도
100%회원구분
개인회원- Nordic BLE : 하드웨어(회로/아트웍) 및 펌웨어 - IMU 관련 개발 : 가속도, 자이로, 지자기 센서 및 기압 센서 관련 - Android App 개발 : 하드웨어 연계(BLE 등) - Amazon AWS : EC2, Lightsail, RDS(MySQL) - Google Cloud Platform(GCP) : Firestore, OAuth, Realtime DB
- 서비스 설명란에 제시된 IMU센서 이외의 센서 적용 시 하드웨어 설계 오류에 대한 수정 및 재진행 가능 - 서비스 설명란에 제시된 정밀도 이외로 고 정밀을 요구하는 경우 요구 과제로 전환 및 개발 가능 - 군용 Application에 대해서는 수정 및 재진행 불가(추가 협의 필요) - 군용의 정의는 국방부 산하 육/해/공/해병대 및 국방부, 정보기관을 포함합니다.
가. 기본 환불 규정 1. 전문가와 의뢰인의 상호 협의하에 청약 철회 및 환불이 가능합니다. 2. 작업이 완료된 이후 또는 자료, 프로그램 등 서비스가 제공된 이후에는 환불이 불가합니다. ( 소비자보호법 17조 2항의 5조. 용역 또는 「문화산업진흥 기본법」 제2조 제5호의 디지털콘텐츠의 제공이 개시된 경우에 해당) 나. 전문가 책임 사유 1. 전문가의 귀책사유로 당초 약정했던 서비스 미이행 혹은 보편적인 관점에서 심각하게 잘못 이행한 경우 결제 금액 전체 환불이 가능합니다. 다. 의뢰인 책임 사유 1. 서비스 진행 도중 의뢰인의 귀책사유로 인해 환불을 요청할 경우, 사용 금액을 아래와 같이 계산 후 총 금액의 10%를 공제하여 환불합니다. 총 작업량의 1/3 경과 전 : 이미 납부한 요금의 2/3해당액 총 작업량의 1/2 경과 전 : 이미 납부한 요금의 1/2해당액 총 작업량의 1/2 경과 후 : 반환하지 않음
| 서비스 제공자 | Roverdyn | 취소/환불 조건 | 취소 및 환불 규정 참조 |
| 인증/허가사항 | 상품 상세 참조 | 취소/환불 방법 | 취소 및 환불 규정 참조 |
| 이용조건 | 상품 상세 참조 | 소비자상담전화 | 결제 전 상담 제공 |
아직 작성된 리뷰가 없어요.